Wavemap
Official implementation of the Wavemap mapping framework, described in the paper:
"Efficient volumetric mapping of multi-scale environments using wavelet-based compression." V. Reijgwart, C. Cadena, R. Siegwart, and L. Ott in Robotics: Science and Systems, 2023
Code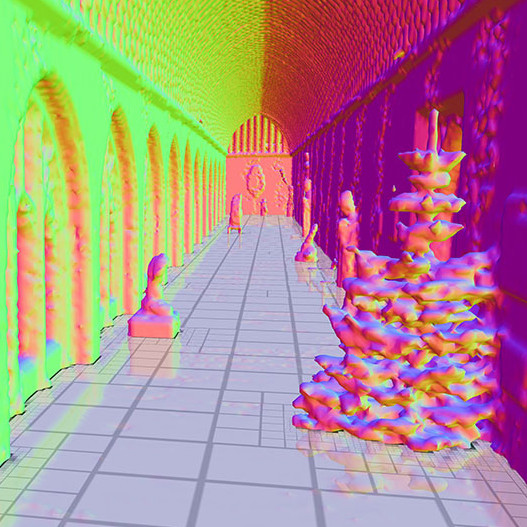
Hilbert Maps
Reference Python implementation of the Hilbert Map mapping method presented in the paper:
"Hilbert maps: scalable continuous occupancy mapping with stochastic gradient descent." F. Ramos and L. Ott In The International Journal of Robotics Research, 2016
Code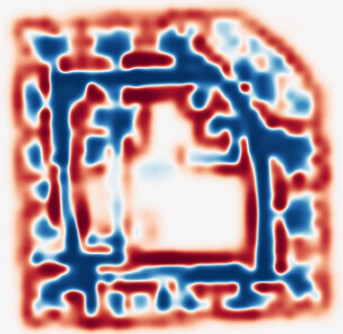
Stochastic Gradient Descent ICP
C++ Reference implementation of the stochastic gradient descent based ICP method presented in the paper:
"Speeding up ICP using Stochastic Gradient Descent" F. Afzal Maken, F. Ramos, L. Ott In IEEE International Conference on Robotics Automation, 2019
The code requires the following libraries
- Eigen 3
- boost
- pcl
and has example programs which produce an aligned point cloud and the estimate of the transform between the two provided inputs.
Code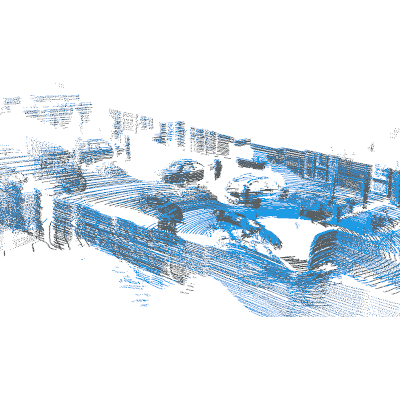
PHASER
Reference implementation of the PHASER algorithm described in the paper:
"PHASER: a Robust and Correspondence-free Global Pointcloud Registration." L. Bernreiter, L. Ott, J. Nieto, R. Siegwart, and C. Cadena in IEEE Robotics and Automation Letters, 2021
Code
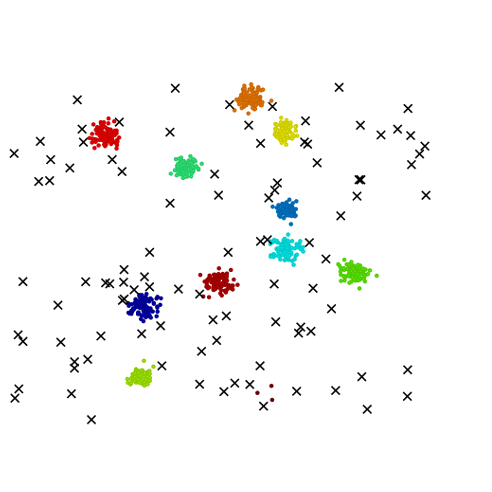
Facility Location Outlier Detection
Basic implementation of the facility location and outlier detection algorithm presented in the paper:
"On integrated clustering and outlier detection.", L. Ott, L. Pang, F. Ramos, and S. Chawla. In Advances in Neural Information Processing Systems, 2014
Code